
Drukarka 3D jest już prawie gotowa do pierwszego wydruku. Nie bez powodu piszę “prawie“, bo zostały dwa etapy przygotowań: elektronika drukarki 3d oraz kalibracja. Można pomyśleć, że te ostatnie czynności to już przysłowiowa bułka z masłem, jednak poprawne połączenie układu sterującego silnikami oraz ekstruderem i późniejsza kalibracja Prusy i3 to kluczowe czynności, które pozwolą na drukowanie z największą dokładnością.
Elektronika drukarki 3D
W pierwszym filmie, w którym wykonywałem unboxing drukarki od Jelweków, pokazałem elektronikę dołączoną do zestawu. RUMBA to skrót od Reprap Universal Mega Board with Allegro driver. Ta elektronika znalazła zastosowanie nie tylko w drukarce 3D od firmy Jelwek ale przez długi czas wykorzystywana była w znanym modelu Monkeyfab PRIME. Elektronika drukarki 3D, którą otrzymałem w paczce, została przygotowana tak, aby po podłączeniu nie trzeba było wgrywać do niej oprogramowania. Oznacza to, że osoba, która nigdy nie miała do czynienia z Arduino czy mikrokontrolerem ATmega 2560 będzie w stanie od razu włączyć i zacząć drukować na swoim RepRap’ie.
Podłączenie unipolarnych silników sześcioprzewodowych
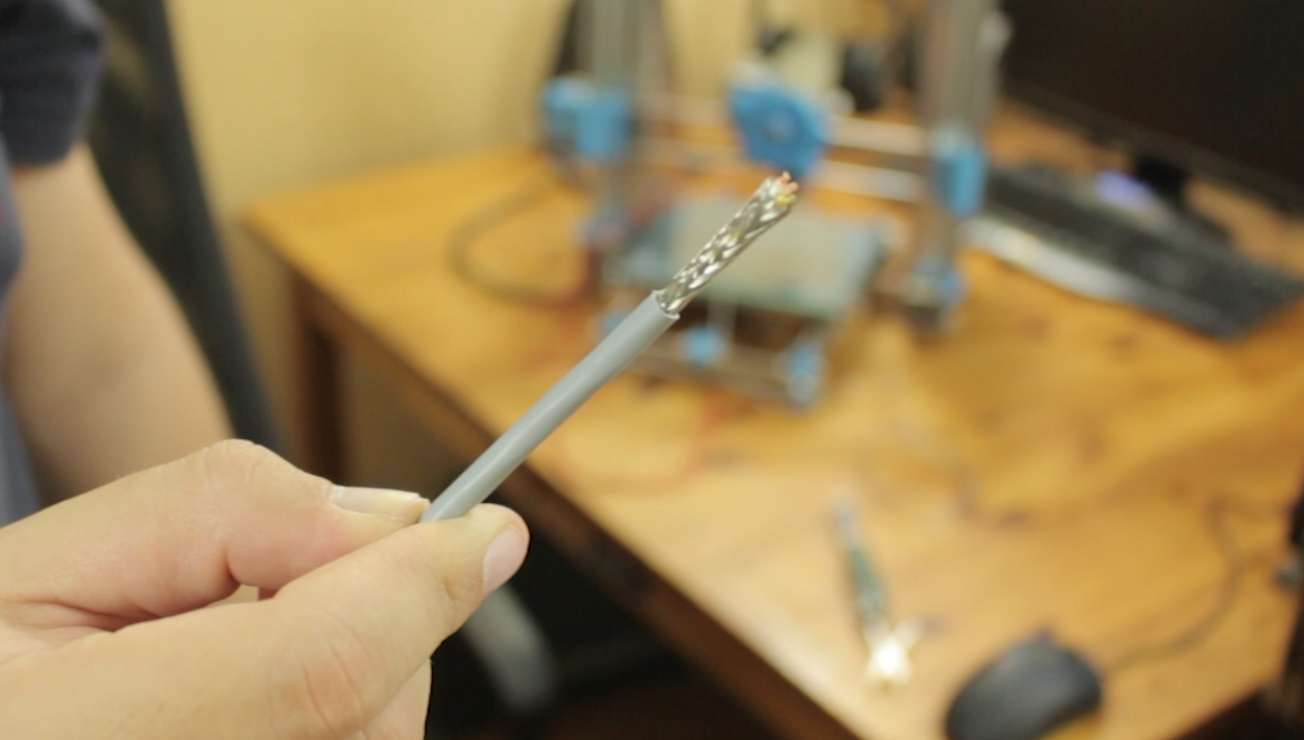
Zestaw zawiera 5 silników krokowych: silnik osi X, silnik osi Y, 2 silniki osi Z oraz silnik ekstrudera. W moim przypadku te ostatnie wymagają szczególnego przygotowania. Z uwagi na to, że z silników osi Z oraz ekstrudera nie wychodzą żadne przewody (obecne są gniazda 6-wyjściowe) to przygotowałem zestaw kabli do podłączenia. Firma Jelwek dołącza w komplecie w sumie kilka metrów różnych przewodów – w tym i kabli 4-żyłowych, odpowiednio ekranowanych, które zapewnią poprawną pracę silników.
W pierwszej kolejności dolutowałem konektory do krańców kabli (konektory 2 mm po stronie silników oraz konektory 2,54 mm po stronie pinów elektroniki – zawarte w zestawie).
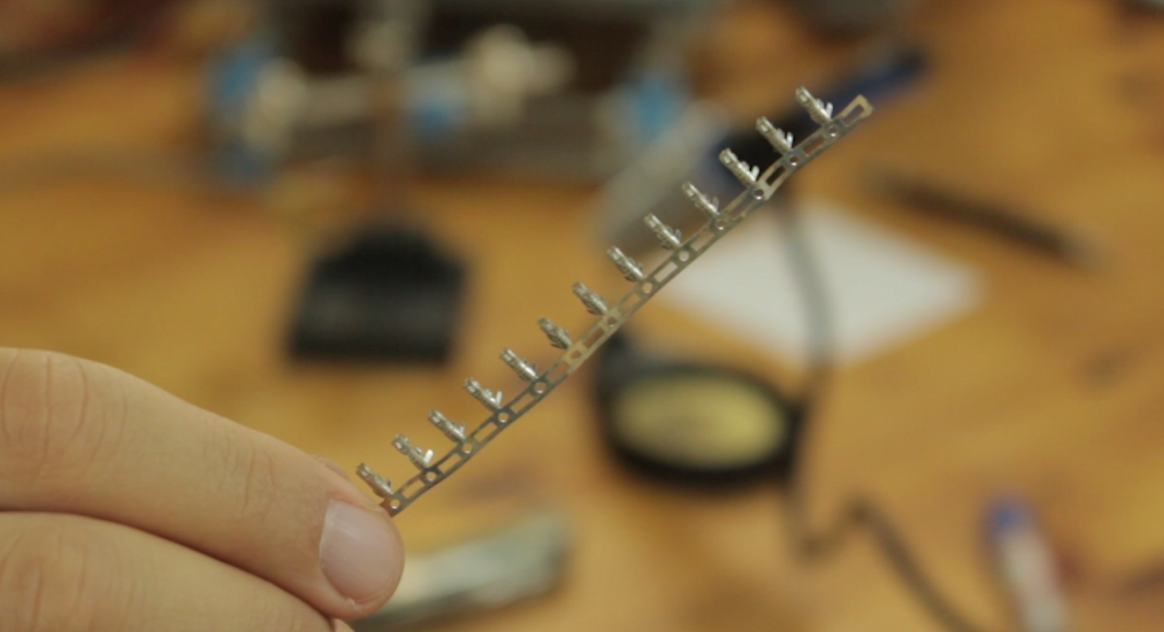
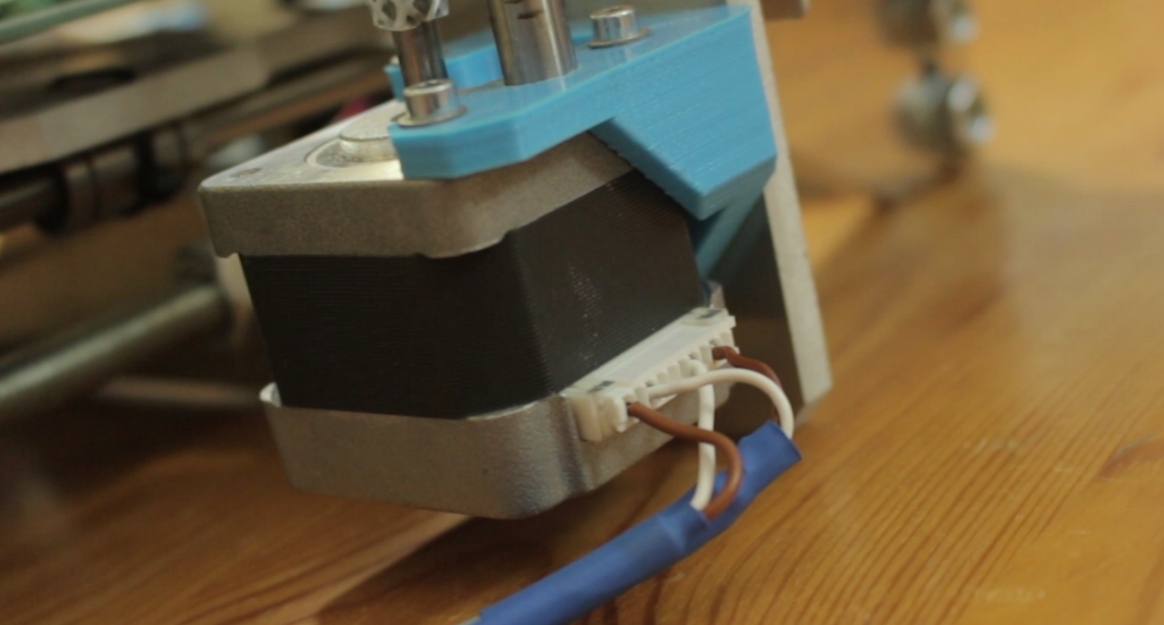
Po przygotowaniu kabli kolejnym zadaniem jest wprowadzenia konektorów 2 mm w odpowiednie miejsca w listwach. Listwy natomiast trzeba wpiąć w gniazda silników.
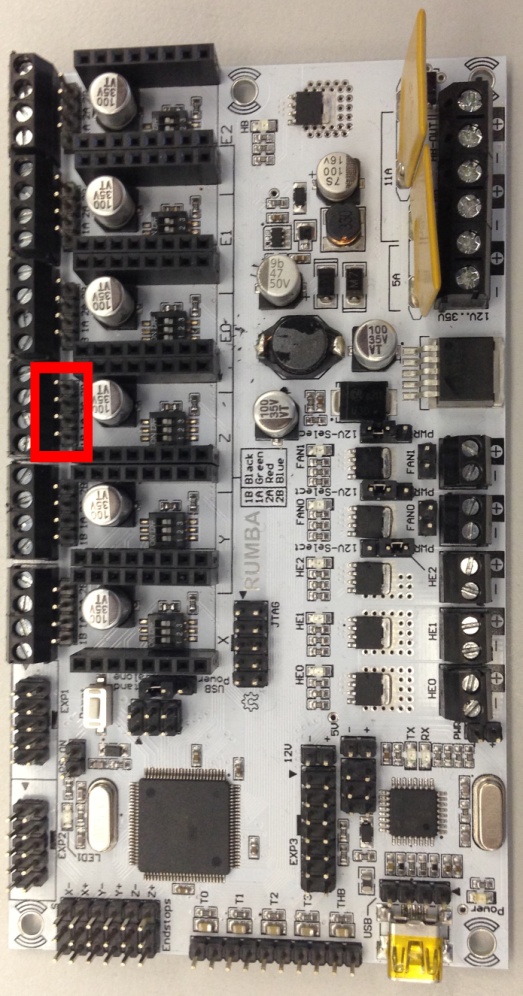
Wcześniej jednak zanim podłączymy poszczególne wyprowadzenia silników musimy zastanowić się w jakiej kolejności mamy je wpiąć do elektroniki. Wcześniej napisałem, że do dyspozycji mamy silniki, które posiadają 6 wyjść. Na płytce elektronicznej, dla każdego silnika przewidziano 4 piny. Rodzi się wtedy pytanie: ale jak ja mam połączyć 6 wyjść z silnika z 4 pinami elektroniki?
Odpowiedź jest jedna. Należy odpowiednio zidentyfikować tylko 4 wyjścia silnika i te połączyć z elektroniką. Aby wykonać to zadanie, musimy zmierzyć rezystancję między każdym z wyprowadzeń silnika. Na poniższym rysunku przedstawiono schemat silnika unipolarnego sześcioprzewodowego oraz przykładowe rezystancje mierzone między wyprowadzeniami. Tak samo musimy zidentyfikować piny drugiej cewki silnika.
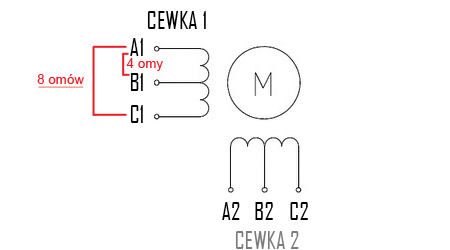
Z powyższego rysunku wynika, że największa rezystancja została zmierzona dla A1 oraz C1 i te dwa wyprowadzenia są dla nas tymi, których poszukujemy. Tą samą czynność wykonujemy dla cewki 2.
Szeregowe łączenie silników krokowych
Jak wiecie oś Z napędzana jest przez 2 silniki krokowe. Dobrym sposobem na zapewnienie poprawnej pracy silników tej osi jest połączenie ich szeregowo, jak na poniższym rysunku.
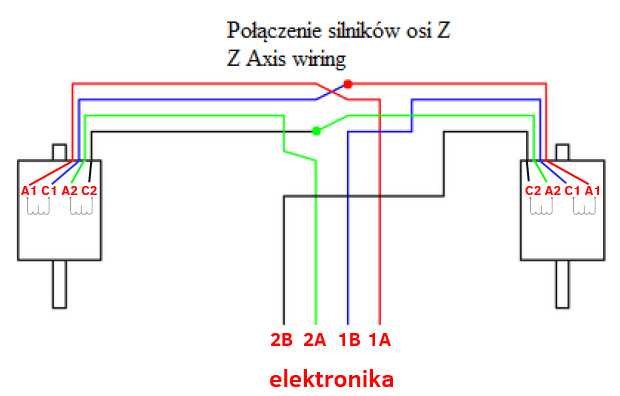
Jeżeli po uruchomieniu silników osi, wałki będą obracać się w przeciwnych kierunkach, to należy odwrócić połączenie jednego aby uzyskać obrót obu silników w tym samym kierunku.
Połączenie silników krokowych ekstrudera oraz pozostałych osi
Sposób podłączenia reszty silników krokowych (unipolarnych, szcześcioprzewodowych) jest analogiczny.
- Identyfikujemy wyprowadzenia silnika (znajdujemy wyprowadzenia każdej z 2 cewek silnika)
- Łączymy PIN 1A (elektronika drukarki 3D) z wyprowadzeniem silnika A1
- Wyprowadzenia silnika C1 łączymy z PINEM 1B (elektronika drukarki 3D)
- PIN 2A (elektronika drukarki 3D) -> A2 silnika
- C2 silnika -> PIN 2B (elektronika drukarki 3D)
Połączenie zasilacza oraz elektroniki drukarki 3D
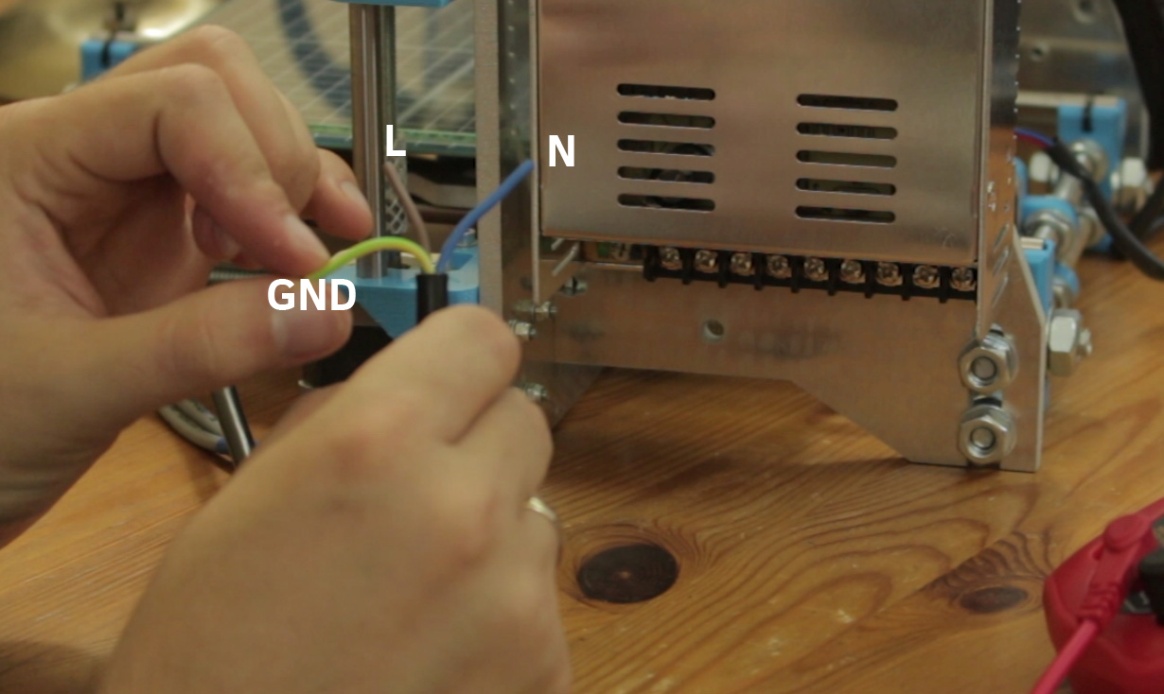
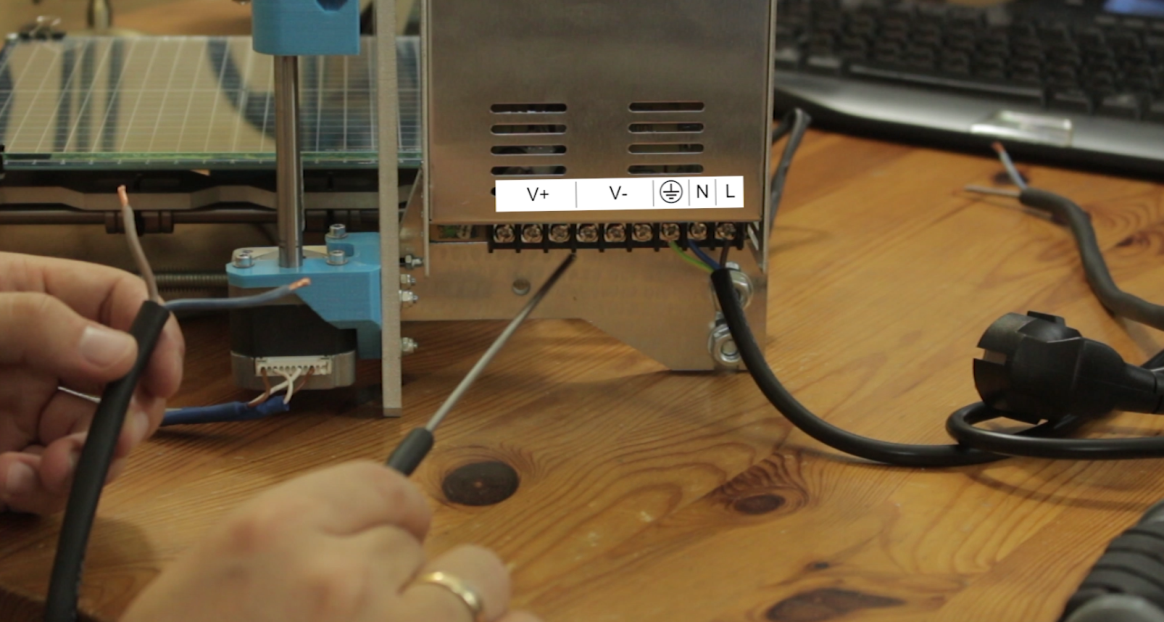
W pierwszym kroku należy przygotować kabel do zasilacza, który będziemy wpinać do gniazdka. W tym celu odciąłem złącze żeńskie i usunąłem izolację z kabli. Następnie połączyłem kable z odpowiednimi złączami zasilacza a wyjścia zasilacza podpiąłem pod elektronikę bazując na schemacie.
Endstopy, grzałka ekstrudera, stół grzewczy i termistory
Endstopy to inaczej krańcówki. Umieszcza się je na końcach prowadnic drukarki 3D po to, aby ograniczyć ruch w każdej z osi. Wyobraźmy sobie, że przesuwamy stół roboczy nie używając endstopów. Podczas przemieszczania stołu łożyska dojeżdżają do końca prowadnic i zatrzymują się. Drukarka 3D “nie wie”, że stół roboczy już dalej nie może się przemieścić, ponieważ oparł się o nogi drukarki 3D. W tym przypadku silnik cały czas próbuje przesunąć stół. Dochodzi do zniszczenia silnika oraz innych elementów osi.
Krańcówki są po to, aby zapobiec takiej sytuacji. Po zetknięciu z krańcówką, silnik zostaje wyłączony i nie dochodzi do uszkodzenia. Na zdjęciu poniżej przedstawiony jest endstop mechaniczny.
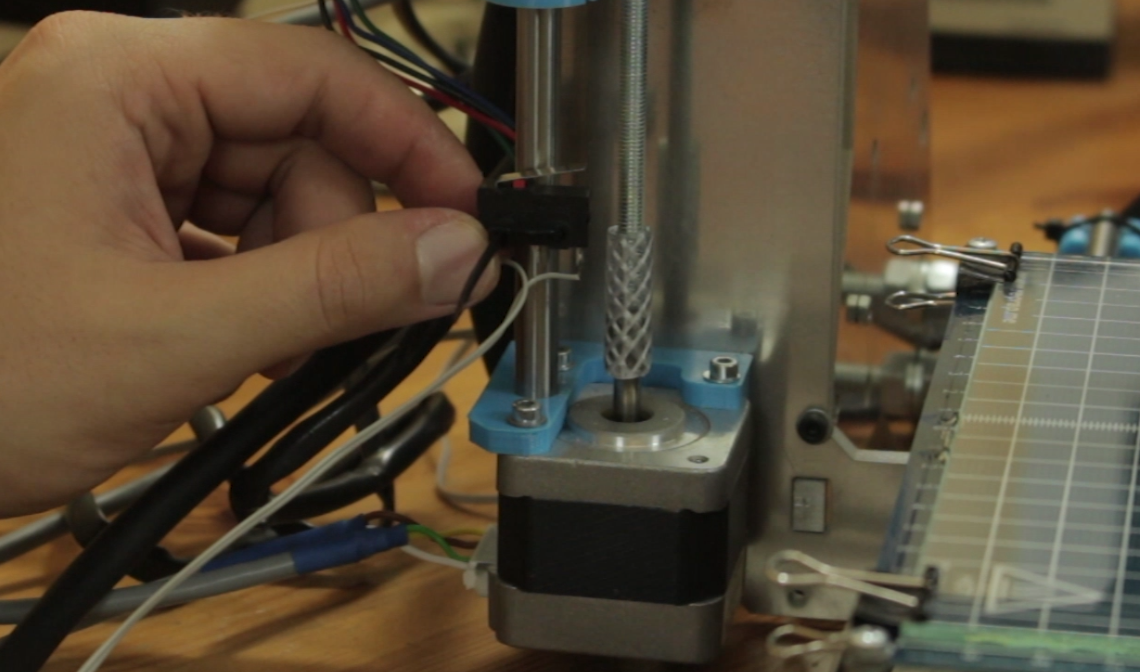
Endstop pełni jeszcze jedną ważną funkcję – pozwala na wyzerowanie pozycji w danej osi. Jest to kluczowy czynnik związany z drukiem 3D, ponieważ drukarka sytuując dyszę w pozycji zerowej dla każdej z osi, uzyskuje swoisty punkt referencyjny w odniesieniu do którego jest w stanie wykonywać wydruki i przemieszczać ekstruder.
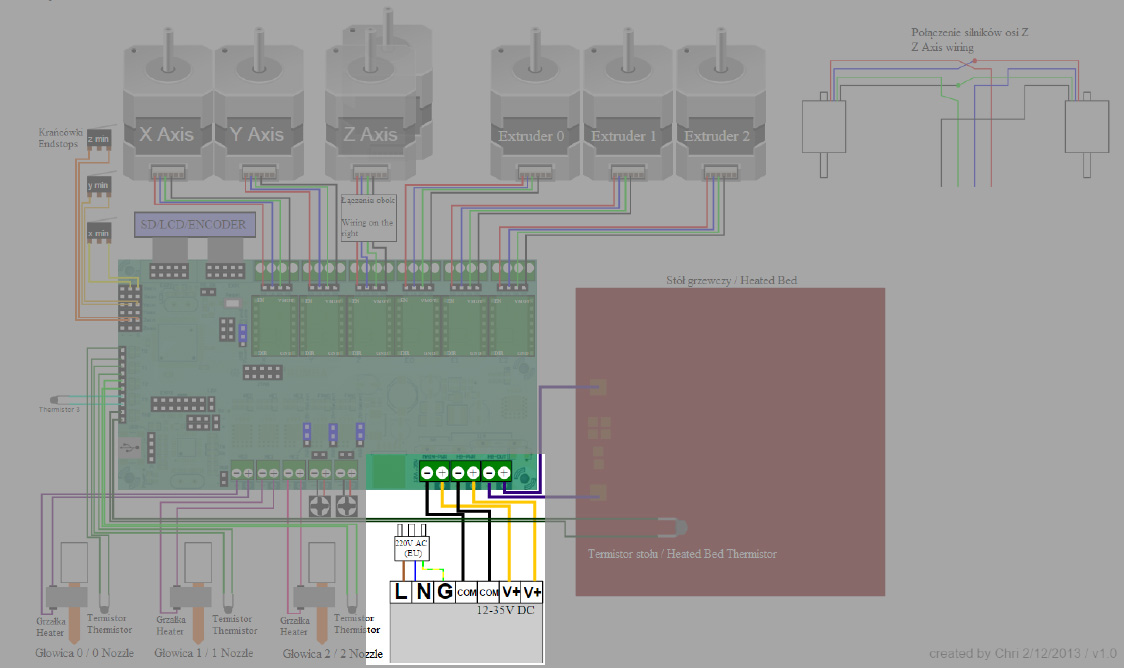
Przewody stołu roboczego, grzałki głowicy, termistorów oraz krańcówek podłączyłem zgodnie z schematem.

Jeżeli chcesz poznać wszystkie szczegóły to koniecznie obejrzyj w całości mój materiał:




Witam,
Dlaczego ta seria nazywa się “budowa” a nie składanie/montaż z gotowych elementów? Moim zdaniem tak było by właściwie.